


LiteOS内核源码分析系列六 -任务及调度(3)-任务LOS_Schedule
调度,Schedule也称为Dispatch,是操作系统的一个重要模块,它负责选择系统要处理的下一个任务。调度模块需要协调处于就绪状态的任务对资源的竞争,按优先级策略从就绪队列中获取高优先级的任务,给予资源使用权。本文我们来一起学习下LiteOS调度模块的源代码,文中所涉及的源代码,均可以在LiteOS开源站点https://gitee.com/LiteOS/LiteOS 获取。调度源代码分布如下:
-
LiteOS内核调度源代码包括调度模块的私有头文件kernel\base\include\los_sched_pri.h、
C源代码文件kernel\base\sched\sched_sq\los_sched.c,这个对应单链表就绪队列。还有个`调度源代码文件kernel\base\sched\sched_mq\los_sched.c,对应多链表就绪队列。本文主要剖析对应单链表就绪队列的调度文件代码,使用多链表就绪队列的调度代码类似。 -
调度模块汇编实现代码
调度模块的汇编函数有
OsStartToRun、OsTaskSchedule等,根据不同的CPU架构,分布在下述文件里:arch\arm\cortex_m\src\dispatch.S、arch\arm\cortex_a_r\src\dispatch.S、arch\arm64\src\dispatch.S。
本文以STM32F769IDISCOVERY为例,分析一下Cortex-M核的调度模块的源代码。我们先看看调度头文件kernel\base\include\los_sched_pri.h中定义的宏函数、枚举、和内联函数。
1、调度模块宏函数和内联函数
kernel\base\include\los_sched_pri.h定义的宏函数、枚举、内联函数。
1.1 宏函数和枚举
UINT32 g_taskScheduled是kernel\base\los_task.c定义的全局变量,标记内核是否开启调度,每一位代表不同的CPU核的调度开启状态。
⑴处定义的宏函数OS_SCHEDULER_SET(cpuid)开启cpuid核的调度。⑵处宏函数OS_SCHEDULER_CLR(cpuid)是前者的反向操作,关闭cpuid核的调度。⑶处宏判断当前核是否开启调度。⑷处的枚举用于标记是否发起了请求调度。当需要调度,又暂不具备调度条件的时候,标记下状态,等具备调度的条件时,再去调度。
⑴ #define OS_SCHEDULER_SET(cpuid) do { \
g_taskScheduled |= (1U << (cpuid)); \
} while (0);
⑵ #define OS_SCHEDULER_CLR(cpuid) do { \
g_taskScheduled &= ~(1U << (cpuid)); \
} while (0);
⑶ #define OS_SCHEDULER_ACTIVE (g_taskScheduled & (1U << ArchCurrCpuid()))
⑷ typedef enum {
INT_NO_RESCH = 0, /* no needs to schedule */
INT_PEND_RESCH, /* pending schedule flag */
} SchedFlag;
1.2 内联函数
有2个内联函数用于检查是否可以调度,即函数STATIC INLINE BOOL OsPreemptable(VOID)和STATIC INLINE BOOL OsPreemptableInSched(VOID)。区别是,前者判断是否可以抢占调度时,先关中断,避免当前的任务迁移到其他核,返回错误的是否可以抢占调度状态。
1.2.1 内联函数STATIC INLINE BOOL OsPreemptable(VOID)
我们看下BOOL OsPreemptable(VOID)函数的源码。⑴、⑶属于关闭、开启中断,保护检查抢占状态的操作。⑵处判断是否可抢占调度,如果不能调度,则标记下是否需要调度标签为INT_PEND_RESCH。
STATIC INLINE BOOL OsPreemptable(VOID)
{
⑴ UINT32 intSave = LOS_IntLock();
⑵ BOOL preemptable = (OsPercpuGet()->taskLockCnt == 0);
if (!preemptable) {
OsPercpuGet()->schedFlag = INT_PEND_RESCH;
}
⑶ LOS_IntRestore(intSave);
return preemptable;
}
1.2.2 内联函数STATIC INLINE BOOL OsPreemptableInSched(VOID)
函数STATIC INLINE BOOL OsPreemptableInSched(VOID)检查是否可以抢占调度,检查的方式是判断OsPercpuGet()->taskLockCnt的计数,见⑴、⑵处代码。如果不能调度,则执行⑶标记下是否需要调度标签为INT_PEND_RESCH。对于SMP多核,是否可以调度的检查方式,稍有不同,因为调度持有自旋锁,计数需要加1,见代码。
STATIC INLINE BOOL OsPreemptableInSched(VOID)
{
BOOL preemptable = FALSE;
#ifdef LOSCFG_KERNEL_SMP
⑴ preemptable = (OsPercpuGet()->taskLockCnt == 1);
#else
⑵ preemptable = (OsPercpuGet()->taskLockCnt == 0);
#endif
if (!preemptable) {
⑶ OsPercpuGet()->schedFlag = INT_PEND_RESCH;
}
return preemptable;
}
1.2.3 内联函数STATIC INLINE VOID LOS_Schedule(VOID)
函数STATIC INLINE VOID LOS_Schedule(VOID)用于触发触发调度。⑴处代码表示,如果系统正在处理中断,标记下是否需要调度标签为INT_PEND_RESCH,等待合适时机再调度。然后调用VOID OsSchedPreempt(VOID)函数,下午会分析该函数。二者的区别就是多个检查,判断是否系统是否正在处理中断。
STATIC INLINE VOID LOS_Schedule(VOID)
{
if (OS_INT_ACTIVE) {
⑴ OsPercpuGet()->schedFlag = INT_PEND_RESCH;
return;
}
OsSchedPreempt();
}
2、调度模块常用接口
这一小节,我们看看kernel\base\sched\sched_sq\los_sched.c定义的调度接口,包含VOID OsSchedPreempt(VOID)、VOID OsSchedResched(VOID)两个主要的调度接口。两者的区别是,前者需要把当前任务放入就绪队列内,再调用后者触发调用。后者直接从就绪队列里获取下一个任务,然后触发调度去运行下一个任务。这2个接口都是内部接口,对外提供的调度接口是上一小节分析过的STATIC INLINE VOID LOS_Schedule(VOID),三者有调用关系STATIC INLINE VOID LOS_Schedule(VOID)--->VOID OsSchedPreempt(VOID)--->VOID OsSchedResched(VOID)。
我们分析下这些调度接口的源代码。
2.1 抢占调度函数VOID OsSchedResched(VOID)
抢占调度函数VOID OsSchedResched(VOID),我们分析下源代码。
⑴验证需要持有任务模块的自旋锁。⑵处判断是否支持调度,如果不具备调度的条件,则暂不调度。⑶获取当前运行任务,从就绪队列中获取下一个高优先级的任务。验证下一个任务newTask不能为空,并更改其状态为非就绪状态。⑷处判断当前任务和下一个任务不能为同一个,否则返回。这种情况不会发生,当前任务肯定会从优先级队列中移除的,二者不可能是同一个。⑸更改2个任务的运行状态,当前任务设置为非运行状态,下一个任务设置为运行状态。⑹处如果支持多核,则更改任务的运行在哪个核。紧接着的一些代码属于调度维测信息,暂时不管。⑺处如果支持时间片调度,并且下一个新任务的时间片为0,设置为时间片超时时间的最大值LOSCFG_BASE_CORE_TIMESLICE_TIMEOUT。⑻设置下一个任务newTask为当前运行任务,会更新全局变量g_runTask。然后调用汇编函数OsTaskSchedule(newTask, runTask)执行调度,后文分析该汇编函数的实现代码。
VOID OsSchedResched(VOID)
{
LosTaskCB *runTask = NULL;
LosTaskCB *newTask = NULL;
⑴ LOS_ASSERT(LOS_SpinHeld(&g_taskSpin));
⑵ if (!OsPreemptableInSched()) {
return;
}
⑶ runTask = OsCurrTaskGet();
newTask = OsGetTopTask();
LOS_ASSERT(newTask != NULL);
newTask->taskStatus &= ~OS_TASK_STATUS_READY;
⑷ if (runTask == newTask) {
return;
}
⑸ runTask->taskStatus &= ~OS_TASK_STATUS_RUNNING;
newTask->taskStatus |= OS_TASK_STATUS_RUNNING;
#ifdef LOSCFG_KERNEL_SMP
⑹ runTask->currCpu = OS_TASK_INVALID_CPUID;
newTask->currCpu = ArchCurrCpuid();
#endif
OsTaskTimeUpdateHook(runTask->taskId, LOS_TickCountGet());
#ifdef LOSCFG_KERNEL_CPUP
OsTaskCycleEndStart(newTask);
#endif
#ifdef LOSCFG_BASE_CORE_TSK_MONITOR
OsTaskSwitchCheck(runTask, newTask);
#endif
LOS_TRACE(TASK_SWITCH, newTask->taskId, runTask->priority, runTask->taskStatus, newTask->priority,
newTask->taskStatus);
#ifdef LOSCFG_DEBUG_SCHED_STATISTICS
OsSchedStatistics(runTask, newTask);
#endif
PRINT_TRACE("cpu%u (%s) status: %x -> (%s) status:%x\n", ArchCurrCpuid(),
runTask->taskName, runTask->taskStatus,
newTask->taskName, newTask->taskStatus);
#ifdef LOSCFG_BASE_CORE_TIMESLICE
if (newTask->timeSlice == 0) {
⑺ newTask->timeSlice = LOSCFG_BASE_CORE_TIMESLICE_TIMEOUT;
}
#endif
⑻ OsCurrTaskSet((VOID*)newTask);
OsTaskSchedule(newTask, runTask);
}
2.2 抢占调度函数VOID OsSchedPreempt(VOID)
抢占调度函数VOID OsSchedPreempt(VOID),把当前任务放入就绪队列,从队列中获取高优先级任务,然后尝试调度。当锁调度,或者没有更高优先级任务时,调度不会发生。⑴处判断是否支持调度,如果不具备调度的条件,则暂不调度。⑵获取当前任务,更改其状态为非就绪状态。
如果开启时间片调度并且当前任务时间片为0,则执行⑶把当前任务放入就绪队列的尾部,否则执行⑷把当前任务放入就绪队列的头部,同等优先级下可以更早的运行。⑸调用函数OsSchedResched()去调度。
VOID OsSchedPreempt(VOID)
{
LosTaskCB *runTask = NULL;
UINT32 intSave;
⑴ if (!OsPreemptable()) {
return;
}
SCHEDULER_LOCK(intSave);
⑵ runTask = OsCurrTaskGet();
runTask->taskStatus |= OS_TASK_STATUS_READY;
#ifdef LOSCFG_BASE_CORE_TIMESLICE
if (runTask->timeSlice == 0) {
⑶ OsPriQueueEnqueue(&runTask->pendList, runTask->priority);
} else {
#endif
⑷ OsPriQueueEnqueueHead(&runTask->pendList, runTask->priority);
#ifdef LOSCFG_BASE_CORE_TIMESLICE
}
#endif
⑸ OsSchedResched();
SCHEDULER_UNLOCK(intSave);
}
2.3 时间片检查函数VOID OsTimesliceCheck(VOID)
函数VOID OsTimesliceCheck(VOID)在支持时间片调度时才生效,该函数在tick中断函数VOID OsTickHandler(VOID)里调用。如果当前运行函数的时间片使用完毕,则触发调度。⑴处获取当前运行任务,⑵判断runTask->timeSlice时间片是否为0,不为0则减1。如果减1后为0,则执行⑶调用LOS_Schedule()触发调度。
#ifdef LOSCFG_BASE_CORE_TIMESLICE
LITE_OS_SEC_TEXT VOID OsTimesliceCheck(VOID)
{
⑴ LosTaskCB *runTask = OsCurrTaskGet();
⑵ if (runTask->timeSlice != 0) {
runTask->timeSlice--;
if (runTask->timeSlice == 0) {
⑶ LOS_Schedule();
}
}
}
#endif
3、调度模块汇编函数
文件arch\arm\cortex_m\src\dispatch.S定义了调度的汇编函数,我们分析下这些调度接口的源代码。汇编文件中定义了如下几个宏,见注释。
.equ OS_NVIC_INT_CTRL, 0xE000ED04 ; Interrupt Control State Register,ICSR 中断控制状态寄存器
.equ OS_NVIC_SYSPRI2, 0xE000ED20 ; System Handler Priority Register 系统优先级寄存器
.equ OS_NVIC_PENDSV_PRI, 0xF0F00000 ; PendSV异常优先级
.equ OS_NVIC_PENDSVSET, 0x10000000 ; ICSR寄存器的PENDSVSET位置1时,会触发PendSV异常
.equ OS_TASK_STATUS_RUNNING, 0x0010 ; los_task_pri.h中的同名宏定义,数值也一样,表示任务运行状态,
3.1 OsStartToRun汇编函数
函数OsStartToRun在文件kernel\init\los_init.c中的运行函数VOID OsStart(VOID)启动系统阶段调用,传入的参数为就绪队列中最高优秀级的LosTaskCB *taskCB。我们接下来分析下该函数的汇编代码。
⑴处设置PendSV异常优先级为OS_NVIC_PENDSV_PRI,PendSV异常一般设置为最低。全局变量g_oldTask、g_runTask定义在arch\arm\cortex_m\src\task.c文件内,分别记录上一次运行的任务、和当前运行的任务。⑵处代码把函数OsStartToRun的入参LosTaskCB *taskCB赋值给这2个全局变量。
⑶处往控制寄存器CONTROL写入二进制的10,表示使用PSP栈,特权级的线程模式。UINT16 taskStatus是LosTaskCB结构体的第二个成员变量,⑷处[r0 , #4]获取任务状态,此时寄存器r7数值为0x4,即就绪状态OS_TASK_STATUS_READY。然后把任务状态改为运行状态OS_TASK_STATUS_RUNNING。
⑸处把[r0]的值即任务的栈指针taskCB->stackPointer加载到寄存器R12,现在R12指向任务栈的栈指针,任务栈现在保存的是上下文,对应定义在arch\arm\cortex_m\include\arch\task.h中的结构体TaskContext。往后2行代码把R12加36+64=100,共25个4字节长度,其中包含S16到S31共16个4字节,R4到R11及PriMask共9个4字节的长度,当前R12指向任务栈中上下文的UINT32 R0位置,如图。
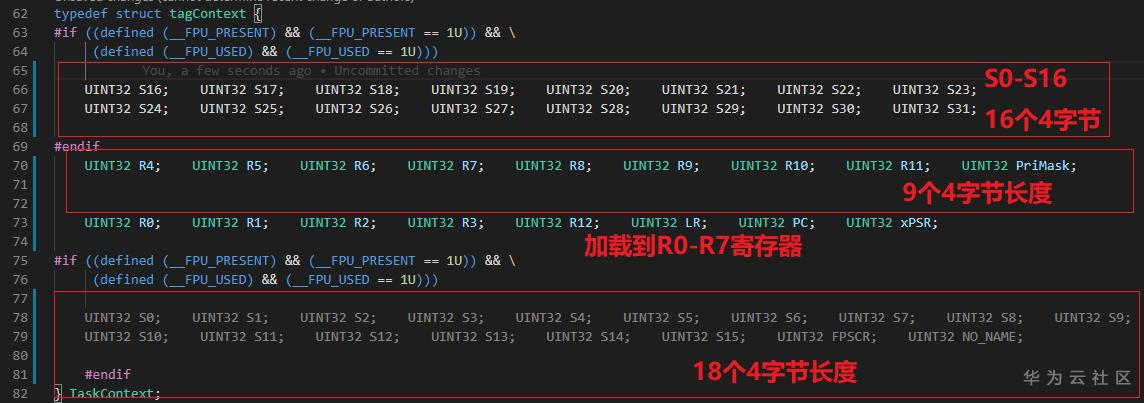
⑹处代码把任务栈上下文中的UINT32 R0; UINT32 R1; UINT32 R2; UINT32 R3; UINT32 R12; UINT32 LR; UINT32 PC; UINT32 xPSR;的分别加载到寄存器R0-R7,其中R5对应UINT32 LR,R6对应UINT32 PC,此时寄存器R12指向任务栈上下文的UINT32 xPSR。执行⑺处指令,指针继续加18个4字节长度,即对应S0到S15及UINT32 FPSCR; UINT32 NO_NAME等上下文的18个成员。此时,
寄存器R12指向任务栈的栈底,紧接着把寄存器R12写入寄存器psp。
最后,执行⑻处指令,把R5写入lr寄存器,开中断,然后跳转到R6对应的上下文的PC对应的函数VOID OsTaskEntry(UINT32 taskId),去执行任务的入口函数。
.type OsStartToRun, %function
.global OsStartToRun
OsStartToRun:
.fnstart
.cantunwind
⑴ ldr r4, =OS_NVIC_SYSPRI2
ldr r5, =OS_NVIC_PENDSV_PRI
str r5, [r4]
⑵ ldr r1, =g_oldTask
str r0, [r1]
ldr r1, =g_runTask
str r0, [r1]
#if defined(LOSCFG_ARCH_CORTEX_M0)
movs r1, #2
msr CONTROL, r1
ldrh r7, [r0 , #4]
movs r6, #OS_TASK_STATUS_RUNNING
strh r6, [r0 , #4]
ldr r3, [r0]
adds r3, r3, #36
ldmfd r3!, {r0-r2}
adds r3, r3, #4
ldmfd r3!, {R4-R7}
msr psp, r3
subs r3, r3, #20
ldr r3, [r3]
#else
⑶ mov r1, #2
msr CONTROL, r1
⑷ ldrh r7, [r0 , #4]
mov r8, #OS_TASK_STATUS_RUNNING
strh r8, [r0 , #4]
⑸ ldr r12, [r0]
ADD r12, r12, #36
#if !defined(LOSCFG_ARCH_CORTEX_M3)
ADD r12, r12, #64
#endif
⑹ ldmfd r12!, {R0-R7}
#if !defined(LOSCFG_ARCH_CORTEX_M3)
⑺ add r12, r12, #72
#endif
msr psp, r12
#if !defined(LOSCFG_ARCH_CORTEX_M3)
vpush {s0};
vpop {s0};
#endif
#endif
⑻ mov lr, r5
cpsie I
bx r6
.fnend
3.2 OsTaskSchedule汇编函数
汇编函数OsTaskSchedule实现新老任务的切换调度。从上文分析抢占调度函数VOID OsSchedResched(VOID)时可以知道,传入了2个参数,分别是新任务LosTaskCB *newTask和当前运行的任务LosTaskCB *runTask,对于Cortex-M核,这2个参数在该汇编函数中没有使用到。在执行汇编函数OsTaskSchedule前,全局变量g_runTask被赋值为要切换运行的新任务LosTaskCB *newTask。
我们看看这个汇编函数的源代码,首先往中断控制状态寄存器OS_NVIC_INT_CTRL中的OS_NVIC_PENDSVSET位置1,触发PendSV异常。执行完毕osTaskSchedule函数,返回上层函数抢占调度函数VOID OsSchedResched(VOID)。PendSV异常的回调函数是osPendSV汇编函数,下文会分析此函数。汇编函数OsTaskSchedule如下:
.type OsTaskSchedule, %function
.global OsTaskSchedule
OsTaskSchedule:
.fnstart
.cantunwind
ldr r2, =OS_NVIC_INT_CTRL
ldr r3, =OS_NVIC_PENDSVSET
str r3, [r2]
bx lr
.fnend
3.3 osPendSV汇编函数
接下来,我们分析下osPendSV汇编函数的源代码。⑴处把寄存器PRIMASK数值写入寄存器r12,备份中断的开关状态,然后执行指令cpsid I屏蔽全局中断。⑵处把当前任务栈的栈指针加载到寄存器r0。⑶处把寄存器r4-r12的数值压入当前任务栈,执行⑷把寄存器d8-d15的数值压入当前任务栈,r0为任务栈指针。
⑸处指令把g_oldTask指针地址加载到r5寄存器,然后下一条指令把g_oldTask指针指向的内存地址值加载到寄存器r1,然后使用寄存器r0数值更新g_oldTask任务的栈指针。
⑹处指令把g_runTask指针地址加载到r0寄存器,然后下一条指令把g_runTask指针指向的内存地址值加载到寄存器r0。此时,r5为上一个任务g_oldTask的指针地址,执行⑺处指令后,g_oldTask、g_runTask都指向新任务。
执行⑻处指令把g_runTask指针指向的内存地址值加载到寄存器r1,此时r1寄存器为新任务g_runTask的栈指针。⑼处指令把新任务栈中的数据加载到寄存器d8-d15寄存器,继续执行后续指令继续加载数据到r4-r12寄存器,然后执行⑽处指令更新psp任务栈指针。⑾处指令恢复中断状态,然后执行跳转指令,后续继续执行C代码VOID OsTaskEntry(UINT32 taskId)进入任务执行入口函数。
.type osPendSV, %function
.global osPendSV
osPendSV:
.fnstart
.cantunwind
⑴ mrs r12, PRIMASK
cpsid I
TaskSwitch:
⑵ mrs r0, psp
#if defined(LOSCFG_ARCH_CORTEX_M0)
subs r0, #36
stmia r0!, {r4-r7}
mov r3, r8
mov r4, r9
mov r5, r10
mov r6, r11
mov r7, r12
stmia r0!, {r3 - r7}
subs r0, #36
#else
⑶ stmfd r0!, {r4-r12}
#if !defined(LOSCFG_ARCH_CORTEX_M3)
⑷ vstmdb r0!, {d8-d15}
#endif
#endif
⑸ ldr r5, =g_oldTask
ldr r1, [r5]
str r0, [r1]
⑹ ldr r0, =g_runTask
ldr r0, [r0]
/* g_oldTask = g_runTask */
⑺ str r0, [r5]
⑻ ldr r1, [r0]
#if !defined(LOSCFG_ARCH_CORTEX_M3) && !defined(LOSCFG_ARCH_CORTEX_M0)
⑼ vldmia r1!, {d8-d15}
#endif
#if defined(LOSCFG_ARCH_CORTEX_M0)
adds r1, #16
ldmfd r1!, {r3-r7}
mov r8, r3
mov r9, r4
mov r10, r5
mov r11, r6
mov r12, r7
subs r1, #36
ldmfd r1!, {r4-r7}
adds r1, #20
#else
ldmfd r1!, {r4-r12}
#endif
⑽ msr psp, r1
⑾ msr PRIMASK, r12
bx lr
.fnend
3.4 开关中断汇编函数
分析中断源代码的时候,提到过开关中断函数UINT32 LOS_IntLock(VOID)、UINT32 LOS_IntUnLock(VOID)、VOID LOS_IntRestore(UINT32 intSave)调用了汇编函数,这些汇编函数分别是本文要分析的ArchIntLock、ArchIntUnlock、ArchIntRestore。我们看下这些汇编代码,PRIMASK寄存器是单一bit的寄存器,置为1后,就关掉所有可屏蔽异常,只剩下NMI和硬Fault异常可以响应。默认值是0,表示没有关闭中断。汇编指令cpsid I会设置PRIMASK=1,关闭中断,指令cpsie I设置PRIMASK=0,开启中断。
⑴处ArchIntLock函数把寄存器PRIMASK数值返回并关闭中断。⑵处ArchIntUnlock函数把寄存器PRIMASK数值返回并开启中断。两个函数的返回结果可以传递给⑶处ArchIntRestore函数,把寄存器状态数值写入寄存器PRIMASK,用于恢复之前的中断状态。不管是ArchIntLock还是ArchIntUnlock,都可以和ArchIntRestore配对使用。
.type ArchIntLock, %function
.global ArchIntLock
⑴ ArchIntLock:
.fnstart
.cantunwind
mrs r0, PRIMASK
cpsid I
bx lr
.fnend
.type ArchIntUnlock, %function
.global ArchIntUnlock
⑵ ArchIntUnlock:
.fnstart
.cantunwind
mrs r0, PRIMASK
cpsie I
bx lr
.fnend
.type ArchIntRestore, %function
.global ArchIntRestore
⑶ ArchIntRestore:
.fnstart
.cantunwind
msr PRIMASK, r0
bx lr
.fnend
小结
本文带领大家一起剖析了LiteOS调度模块的源代码,包含调用接口及底层的汇编函数实现。感谢阅读,如有任何问题、建议,都可以留言给我们: https://gitee.com/LiteOS/LiteOS/issues 。
为了更容易找到LiteOS代码仓,建议访问 https://gitee.com/LiteOS/LiteOS ,关注Watch、点赞Star、并Fork到自己账户下,如下图,谢谢。



留言评论
暂无留言